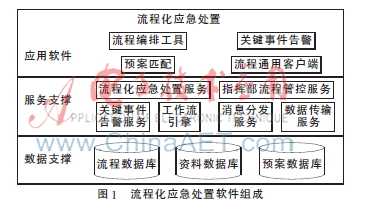
基于QT的跨平台虚拟键盘设计与实现[嵌入式技术][其他]
发表于:2016/2/9 下午9:27:00
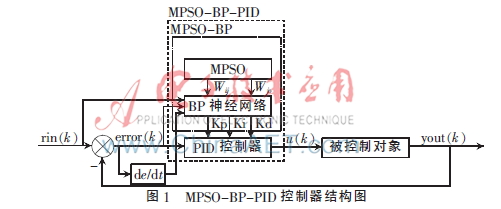
基于MPSO算法的BP神经网络PID控制器研究*[通信与网络][其他]
发表于:2016/2/9 下午8:56:00