
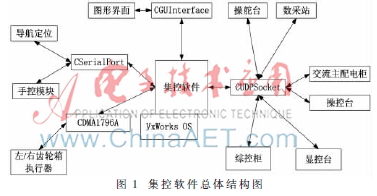
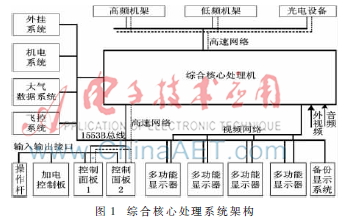
基于智能决策的火箭安控系统[嵌入式技术][航空航天]
发表于:2015/10/21 下午10:22:00

变换域LPI信号设计与性能分析[通信与网络][通信网络]
发表于:2015/10/21 下午10:02:00
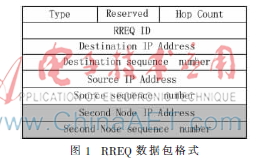
面向车载网的基于AODV优化路由协议的研究[通信与网络][汽车电子]
发表于:2015/10/21 下午9:55:00