译码转发协作通信系统的误码率优化研究[通信与网络][其他]
发表于:2017/1/12 下午1:34:00
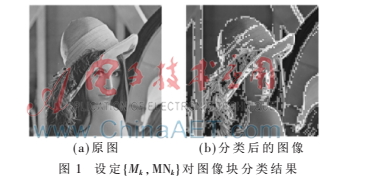
基于图像块分类处理的快速单图超分辨率重建[通信与网络][数据中心]
发表于:2017/1/12 上午11:53:00
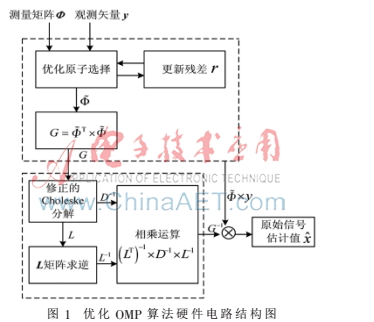
一种基于FPGA实现的优化正交匹配追踪算法设计[可编程逻辑][数据中心]
发表于:2017/1/12 上午11:17:00